
アンカーボックス (Anchor Box) [物体検出]
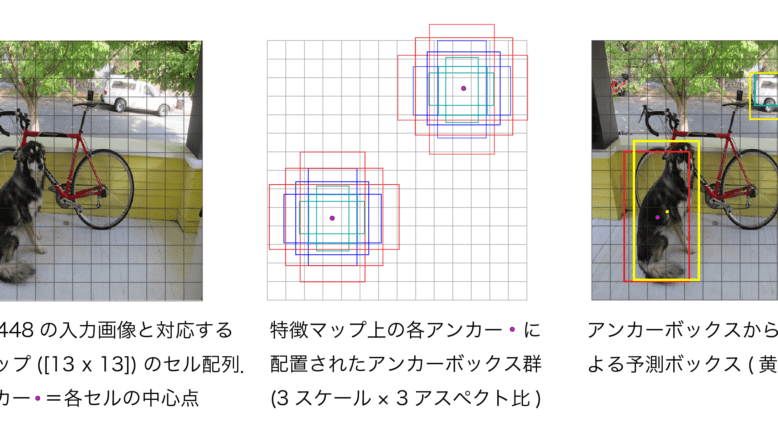
1. アンカーボックス (Anchor box)とは [概要] アンカーボックス (Anchor box)とは,アンカーベースの物体検出ネットワーク手法において,CNN特徴マップ上に配置した各アンカー点周辺に,予測の元矩 続きを読む…
1. アンカーボックス (Anchor box)とは [概要] アンカーボックス (Anchor box)とは,アンカーベースの物体検出ネットワーク手法において,CNN特徴マップ上に配置した各アンカー点周辺に,予測の元矩 続きを読む…
1. 単一クラス物体検出(One-class Object Detection) とは [概要] 単一クラス物体検出(One-class Object Detection)とは,1つのクラスだけに検出対象を絞って学習する 続きを読む…

1. バウンディングボックス(Bounding Box)とは [概要] バウンディングボックス(Bounding Box)とは,外部領域に対して興味対象の物体領域を,最小の長方形で囲って境界で区切る(バウンドする)部分領 続きを読む…
1. バニラ(vanilla)とは [概要] バニラ(vanilla) とは,機械学習において,あるアルゴリズムやモデル・ネットワークが「何も操作されていない」「提案された設計のままの」「元論文どおりの」状態のものを示し 続きを読む…

1. 埋め込み層 (Embedding Layer)とは [概要] 埋め込み層(Embedding Layer)とは,入力のトークンのone-hotベクトル表現(K次元=数万語の辞書)を,自然言語処理ネットワークが扱いや 続きを読む…

1. 層(layers)とは [概要] 層 (layers)とは,ディープラーニングにおいて,DNN(ディープニューラルネットワーク)を構成・設計する際の最小構成単位の部品のことである.この記事で示すような各種の「層」を 続きを読む…

1. ドロップアウト(Dropout) とは [概要] ドロップアウト(Dropout)とは,ディープラーニングの学習中の各エポックにおいて,各層で異なるニューロンをランダムに除去することにより,簡単な処理で強力な正則化 続きを読む…

1. 全結合層 (fully-connected layer)とは [概要] 全結合層 (fully-connected layer, 全连接层)とは,ニューラルネットワークにおいて,前後の層と密に全てのニューロン同士が 続きを読む…

1. PASCAL VOC 2007 データセット とは [概要] PASCAL VOC 2007 データセットは,画像認識向けチャレンジであるPASCAL VOC (Visual Object Classes)のうち, 続きを読む…
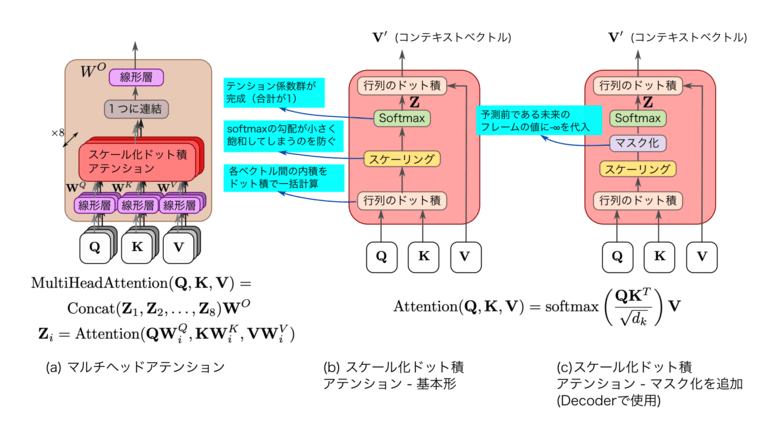
1. マルチヘッドアテンション (Multi-head Attention) とは [概要] マルチヘッドアテンション (Multi-head Attention) とは,Transformerで提案された,複数のアテン 続きを読む…